von Pesi
Hier ein paar Infos zur Erstellung von SW für das SEDU-Board:
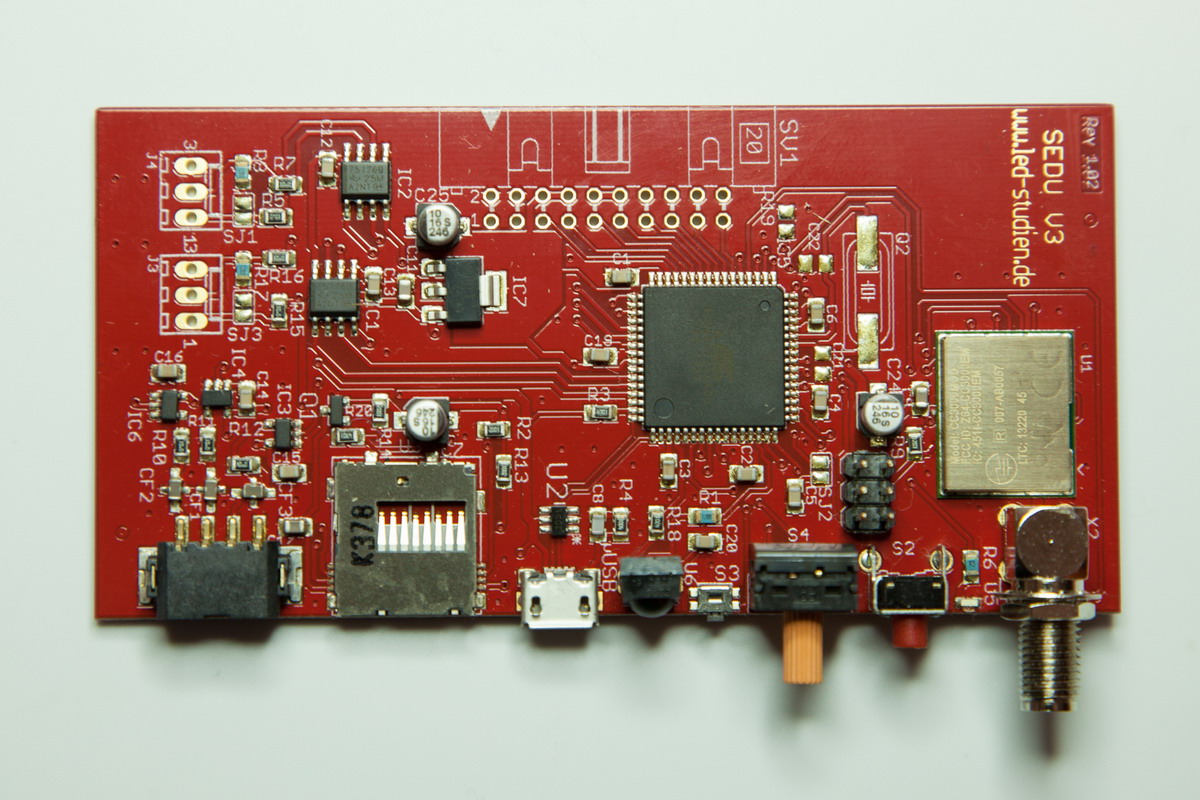
- Das Board ist letztlich nur ein Mega16 mit ein paar ICs und Steckverbindern. Daher ist es ratsam, das Datenblatt des Mega16 für Infos zu Timern, Speicher, Ports etc. zu konsultieren. Hier vorgestellte SW läuft nicht nur exclusiv auf dem SEDU, sondern auf jedem Mega16 mit entsprechender Beschaltung.
- Verbauter µC: Atmega16-16 AU mit 16 MHz Quarz
- Vom Quarz abgeleitet kann für die Kommunikation über den FT232 eine Baudrate von 250.000, 500.000 oder 1.000.000 genutzt werden, andere Baudraten sind aufgrund von „krummen“ Teilern nicht möglich
- Für den FT232 muss auf PC-Seite ein Treiber installiert werden, dieser ist auf der Homepage des Herstellers erhältlich.
- Es können prinzipiell alle Ports/Pins des Mega16 benutzt werden, ein paar davon (alle auf PortD) sind auf dem SEDU-Board über Jumper festen Funktionen zugeteilt (soweit diese verwendet werden):
- PortD 0 = USB/DMX Rx (Empfang)
- PortD 1 = USB/DMX Tx (Senden)
- PortD 2 = DMX2 Rx (Empfang, nur Mega644p-Version!)
- PortD 3 = DMX2 Tx (Senden, nur Mega644p-Version!)
- PortD 4 = CTS (Clear to Send, hiermit kann dem PC über den FT232 Empfangsbereitschaft signalisiert werden)
- PortD 5 = Status-LED (die LED oben zwischen USB- und Hohlbuchse wird mit dem zugehörigen Jumper an PortD5 angeschlossen)
- PortD 6 = DMX Direction (hiermit kann – wenn der Jumper geschlossen ist – der Bustreiber auf dem Board per SW von Senden auf Empfangen umgeschaltet werden)
Um diese Funktionen an die Ports zu koppeln, müssen die entsprechenden Jumper geschlossen werden. Wenn alle Jumper offen sind, sind sämtliche Pins mit ihren Funktionen ohne weitere Beeinflussung über die Stiftleiste „PortD“ verfügbar.
Die restlichen Ports A-C werden direkt auf dem SEDU-Board nicht benutzt, und können mit ihren sämtlichen Funktionen (SPI, TWI, Analog in, etc.) über die Stiftleisten genutzt werden.
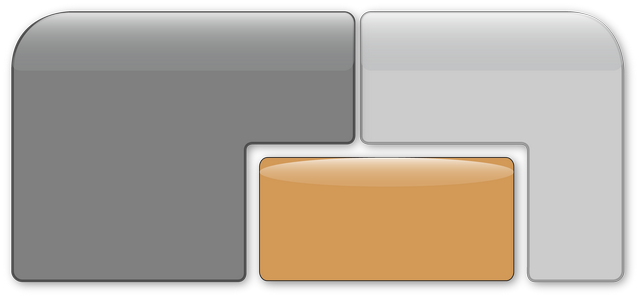
Jumper-Setups am Beispiel
Hierzu folgen Beispiele mit ensprechender Beschreibung:
„normales USB-Setup“
Das SEDU-Board wird komplett über USB mit Spannung versorgt und kommuniziert bidirektional mit dem PC über USB.

SEDU-Jumper USB-Setup
DMX-Setup
Hier wird der SEDU über ein externes Netzteil mit z.B. 12 V versorgt. Die Kommunikation findet über DMX statt, Richtung der Kommunikation ist per Firmware umschaltbar. Der FT232 (USB) wird nicht verwendet.
Wichtig: In der ursprünglich Vorlage zum DMX-Setup war ein Fehler enthalten. Hier ist die geänderte Version. Die beiden Leitungen für Rx und Tx müssen getauscht werden. Das macht man am besten über starre Verbindungen in U-Form.

SEDU-Jumper-DMX gekreuzt
Erläuterung der Jumper im Einzelnen
LED: hiermit wird die Status-LED oben an PortD5 angeschlossen
Vcc: hier wird entschieden, wie der µC etc. auf dem Board versorgt wird: entweder über USB, oder extern über die Hohlbuchse; dabei wird bei externer Versorgung die Spannung über einen 78L05 für den µC geregelt, es können also (je nach Last) 7-24 V eingespeist werden.
bypass: dient zum Überbrücken des 78L05, dadurch können auch stabile 5 V von extern eingespeist werden
Achtung! hier unbedingt auf richtige Polung und Spannung achten, sonst kommt es zur Beschädigung des Boards!
der FT232 wird immer über den USB-Port versorgt, unabhängig von der Jumper-Einstellung
USART: hier kann der USART des Mega16 (Rx und Tx einzeln) entweder auf den FT232 oder den Bustreiber für DMX geroutet werden
Es sind div. Kombinationen möglich, z.B. empfangen über USB und senden per DMX, oder andersrum, es ist auch möglich, bei Tx alle drei Pads zu verbinden, und so gleichzeitig Daten über den Bustreiber wie auch über USB an den PC zu senden – bei Rx dürfen nur 2 Pads verbunden werden!
CTS: verbindet den CTS-Steuereingang des FT232 mit PortD4 des Mega16
ATm644p only: hier kann der 2. USART des Mega644p (wenn bestückt) auf den DMX-Bustreiber geroutet werden.
Es is darauf zu achten, dass in diesem Fall bei USART der entsprechende Pin *nicht* auf „DMX“ gelegt wird, da hierdurch sonst 2 Pins des Mega16 verbunden werden, was zur beschädigung des M16 führen kann.
DMX: Hier wird die Richtung des Bustreibers festgelegt: entweder fest auf senden, oder fest auf empfangen, oder per SW (über PortD6) einstellbar
Achtung! Hier darf immer nur ein Jumper geschlossen werden, keinesfalls 2 oder alle drei, da es: sonst zum Kurzschluss der Versorgung bzw. Beschädigung des µC kommt.